Algorithm teaches robots that knifes and humans don't mix
"Corrective feedback" lets humans teach robots how to handle a range of everyday objects correctly, from sharp ones like knives to fragile ones like eggs
Your support helps us to tell the story
From reproductive rights to climate change to Big Tech, The Independent is on the ground when the story is developing. Whether it's investigating the financials of Elon Musk's pro-Trump PAC or producing our latest documentary, 'The A Word', which shines a light on the American women fighting for reproductive rights, we know how important it is to parse out the facts from the messaging.
At such a critical moment in US history, we need reporters on the ground. Your donation allows us to keep sending journalists to speak to both sides of the story.
The Independent is trusted by Americans across the entire political spectrum. And unlike many other quality news outlets, we choose not to lock Americans out of our reporting and analysis with paywalls. We believe quality journalism should be available to everyone, paid for by those who can afford it.
Your support makes all the difference.The next step in the ‘robot economy’ will see computerised labour step out from behind the computer screen (where it currently handles essentially clerical duties) and step forward to the front line of work: interacting with humans.
Although highly mobile robots already work in production lines and warehouses, they’re mainly kept far away from us. These are beasts of burden that don’t know their own strength, and they’re particularly unfamiliar with that strain of human frailty involving blood and broken bones. Teaching robots how to play nice then, is important.
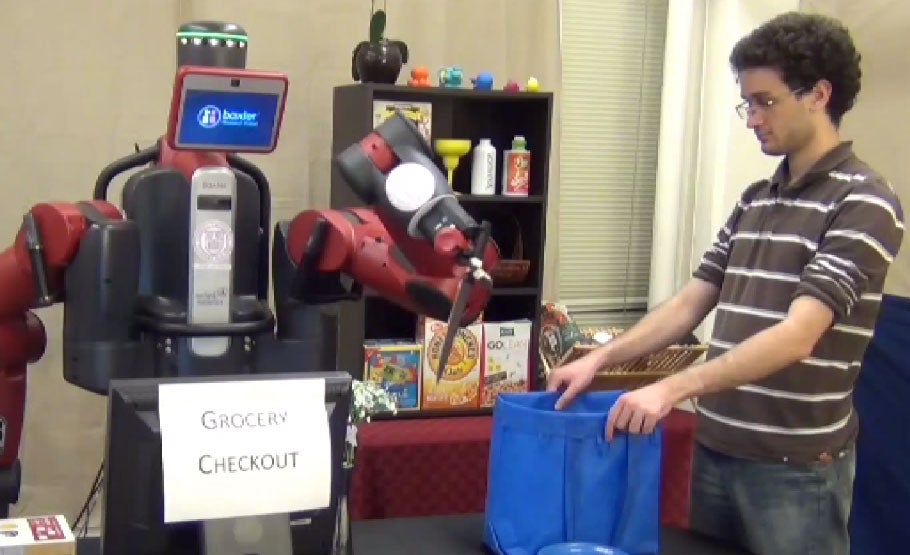
In the video below, engineers from Cornell University use corrective feedback to teach a robot working in a mock supermarket checkout line that humans and knives are a particularly bad mix.
When the robot brings the knife a little too close for comfort to the customer they readjust its arm, eventually turning the knife so points away from the human. The robot now knows that when carrying objects that look like this to keep it tucked in close and not wave it around near humans.
This sort of feedback is important for a wide-range of objects, and although the robot in the demonstration wouldn’t have to keep a box of eggs away from humans, it would have to learn to treat this object differently from a tin of soup.
As the research paper from Ashesh Jain, Thorsten Joachims, and Ashutosh Saxena notes: “These preferences are often hard to describe and anticipate without knowing where and how the robot is deployed.”
The particulars of the algorithm demonstrated also means that the robot can learn general rules even from particularly vague feedback – it doesn’t just follow blindly what the user suggests.
Join our commenting forum
Join thought-provoking conversations, follow other Independent readers and see their replies
Comments